Scholars have proposed to allow collisions of cables with the base, the end-effector, or obstacles to expand the workspace of Cable-Driven Parallel Robots (CDPRs) in recent years.However, allowing collisions also leads to new challenges in kinematics and dynamics modeling for CDPRs.To this end, this paper focuses on a planar fully-constrained n-Degree-of-Freedom (DOF) CDPR driven by n + 1 cables allowing collisions and develops a data-driven dynamics modeling strategy.The data-driven dynamics modeling strategy can address the collisions and optimal tension distribution issues simultaneously.
Based on the data-driven dynamics modeling strategy, this paper proposes a data-driven dynamics-based control strategy for the planar CDPR allowing collisions.A planar two-DOF CDPR prototype driven by three cables is established to evaluate the data-driven dynamics modeling strategy and data-driven dynamics-based control strategy.
data-driven dynamics-based control strategy
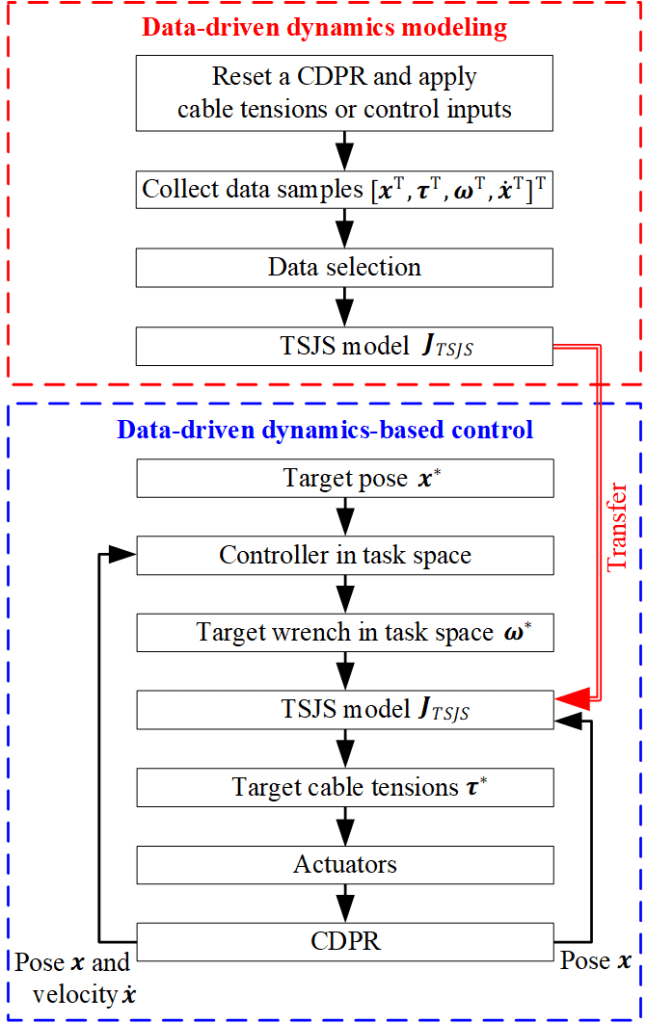
Flow diagram of the data-driven dynamics-based control strategy for a CDPR allowing collisions.
The first part of the red box is to collect the data of the robot model and train the TSJS model. The second part of the blue box is to use the collected data to test on the physical robot platform.
PPT show



this paper is accepted by ASME-Journal of Mechanisms and Robotics.
