Cable-Driven Parallel Robots (CDPRs) have attracted the attention of a large number of researchers in recent years.Researchers proposed to allow wrapping phenomenon to expand the workspace of CDPRs, leading to challenges in the dynamic control of CDPRs.
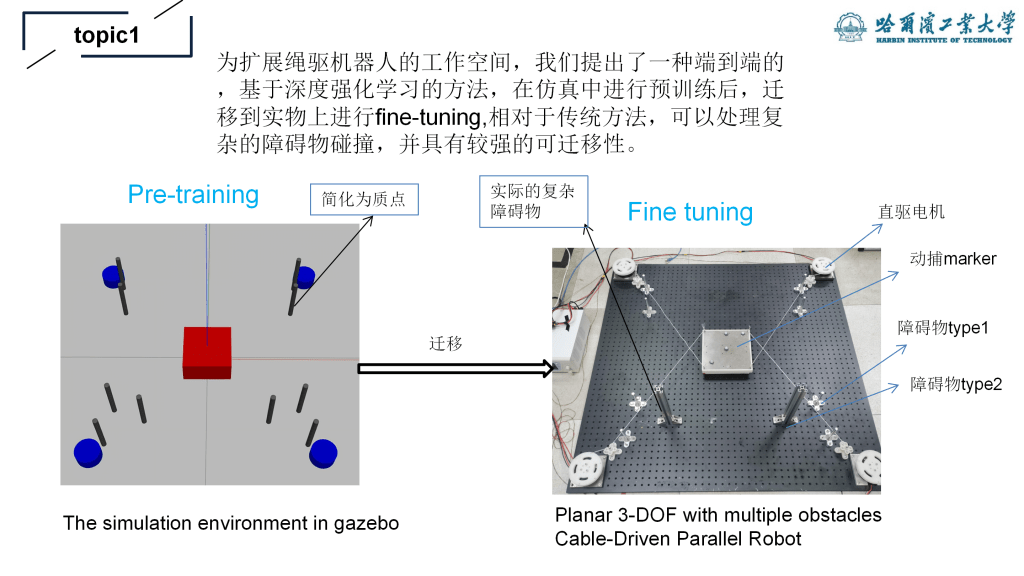
To this end, this study develops a sim-to-real Deep Reinforcement Learning (DRL)-based dynamic control approach for a CDPR allowing wrapping phenomenon.
A planner CDPR prototype allowing wrapping phenomenon is established and the DRL-based dynamic control approach is evaluated based on the CDPR prototype.
The effectiveness of the DRL-based dynamic control approach in controlling the pose of a CDPR allowing wrapping phenomenon is verified.
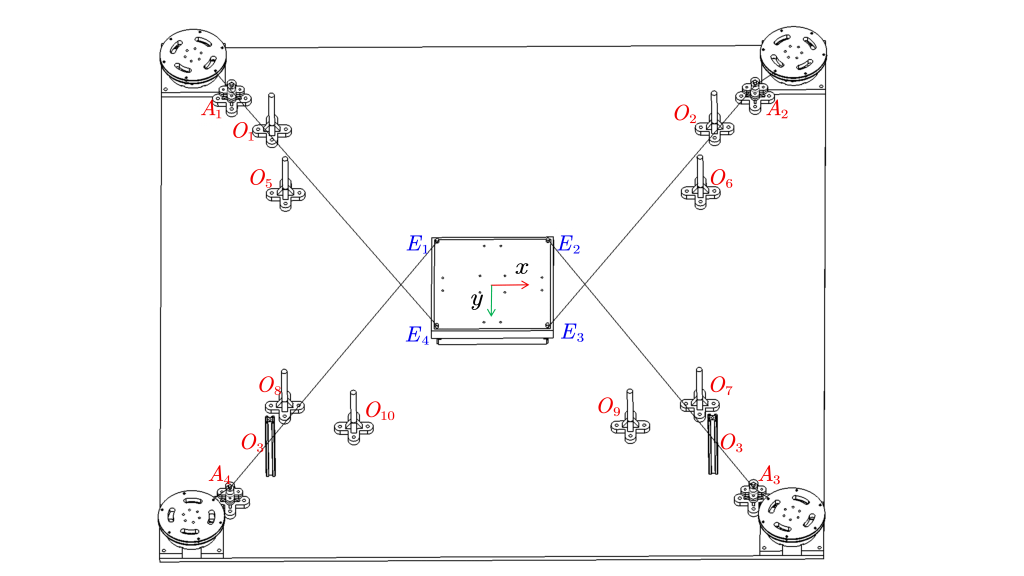
Notation of the CDPR used in simulations and experiments
This paper has the following contributions.
- A sim-to-real DRL-based dynamic control approach for a CDPR allowing wrapping phenomenon.
- The developed DRL-based dynamic control approach is implemented on a CDPR prototype allowing wrapping phenomenon to explain and evaluate the approach.


this paper is accepted by The 8th International Conference on Advanced Robotics(ICARM2023).
