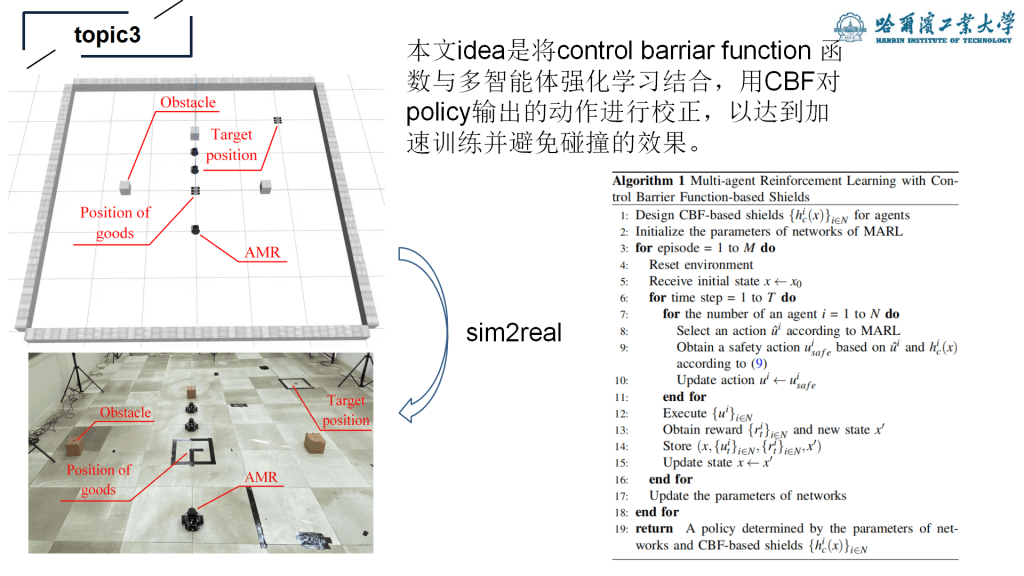
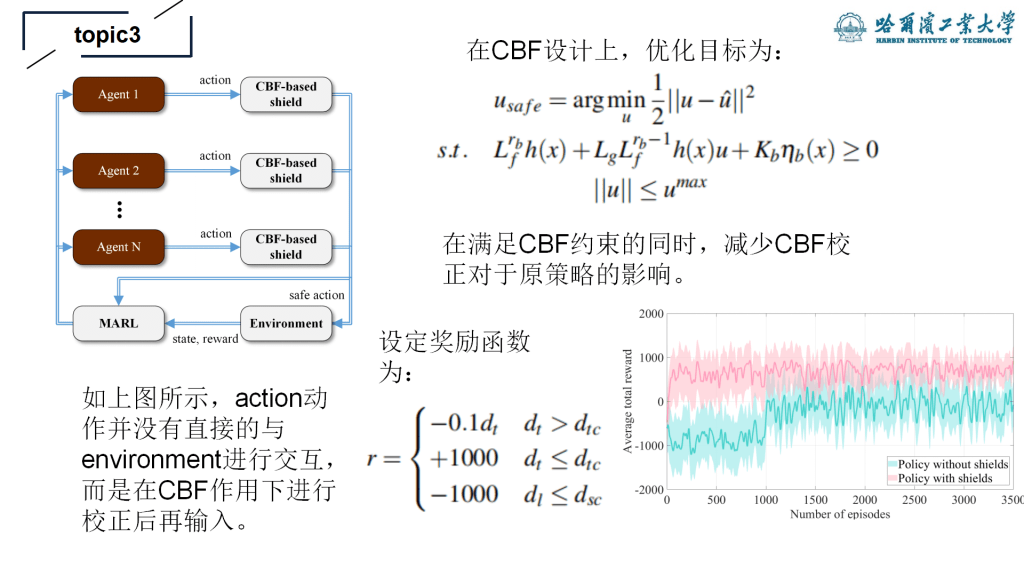
An increasing number of Autonomous Mobile Robots(AMRs)have been used in warehouses and factories in recent years.With the number of AMRs in a warehouse or factory increased,the risk of one of the AMRs being out of control is surging.Although Reinforcement learning(RL)-based approaches have achieved dramatic success in the motion planning of a large number of AMRs,RL-based motion planning approaches cannot provide a safety guarantee for the remaining functional AMRs if one of the AMRs is out of control.To this end,this paper integrates shields based on Control Barrier Functions(CBFs)into multi-agent RL and develops an RL-based motion planning approach with safety guarantees for functional AMRs when suffering an uncontrollable AMR.A CBF-based shield is designed for a functional AMR when suffering an uncontrollable AMR based on the kinematic model of a Differential Driven Robot,aiming to provide safety guarantees for the functional AMR.Experiments are conducted based on a simulated ware-house environment to evaluate the effectiveness of the developed safe RL-based motion planning approach in enhancing the safety of functional AMRs when suffering an uncontrollable AMR.
PPT show

this paper is is submitted to IEEE Transactions on Artificial Intelligence.
