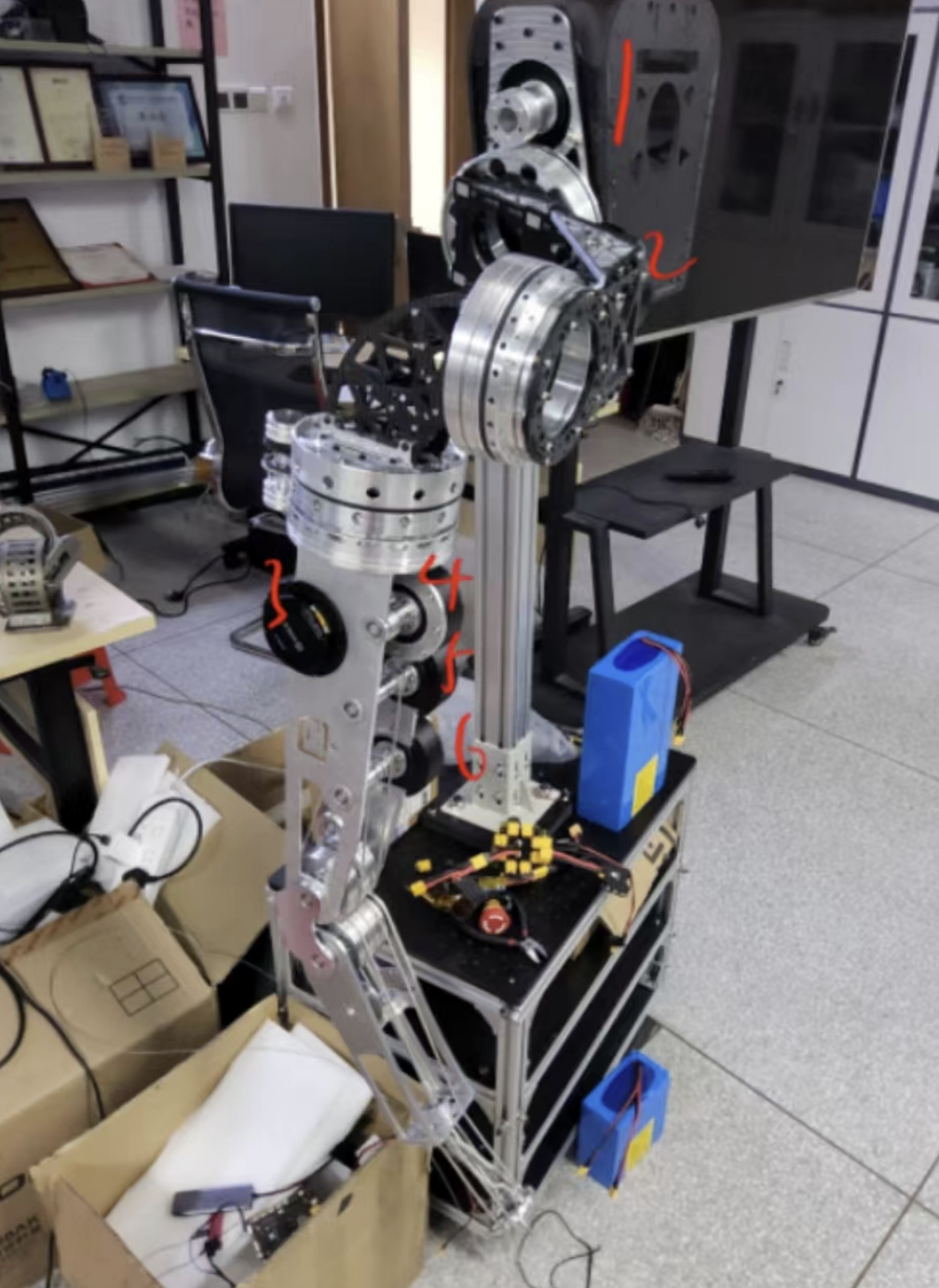
At Tsinghua AI & Robot Lab, I, along with Xiankun Zhu, Hong Luo, and others, collaborated under the guidance of Dr. Chongkun Xia to accomplish the inaugural design and control of the Cable-driven 7-DOF humanoid manipulator.
problem and idea
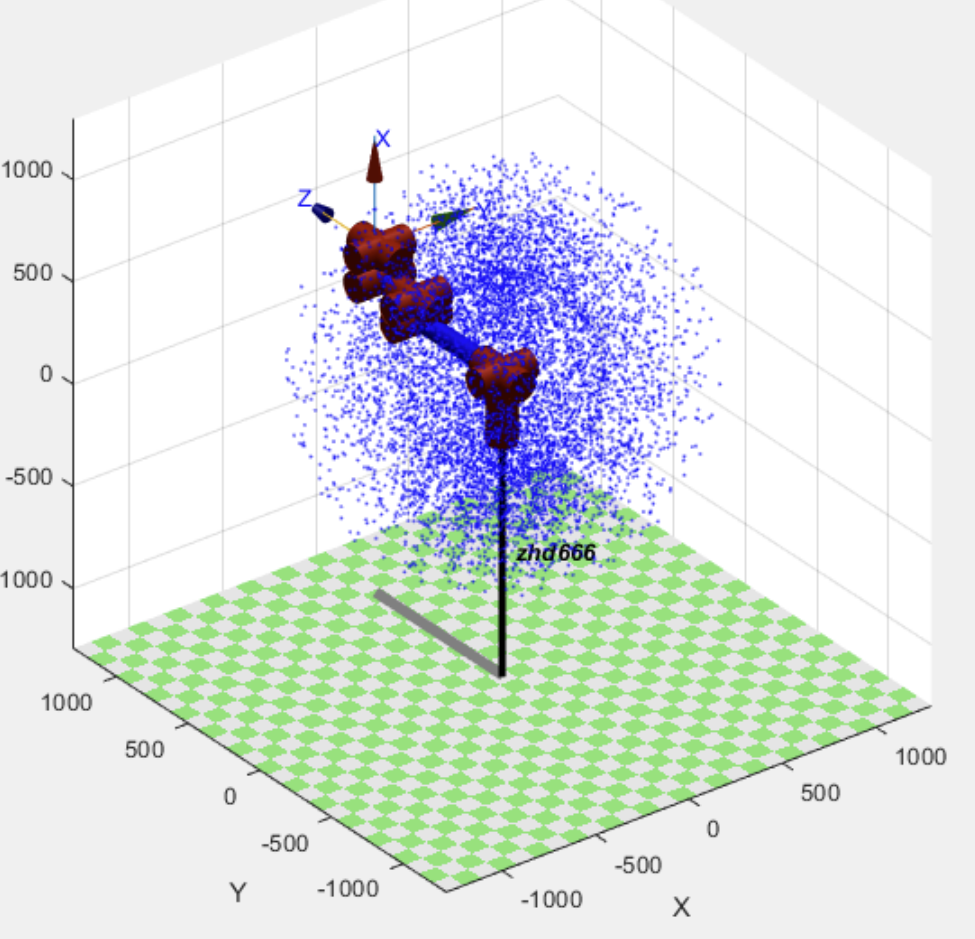
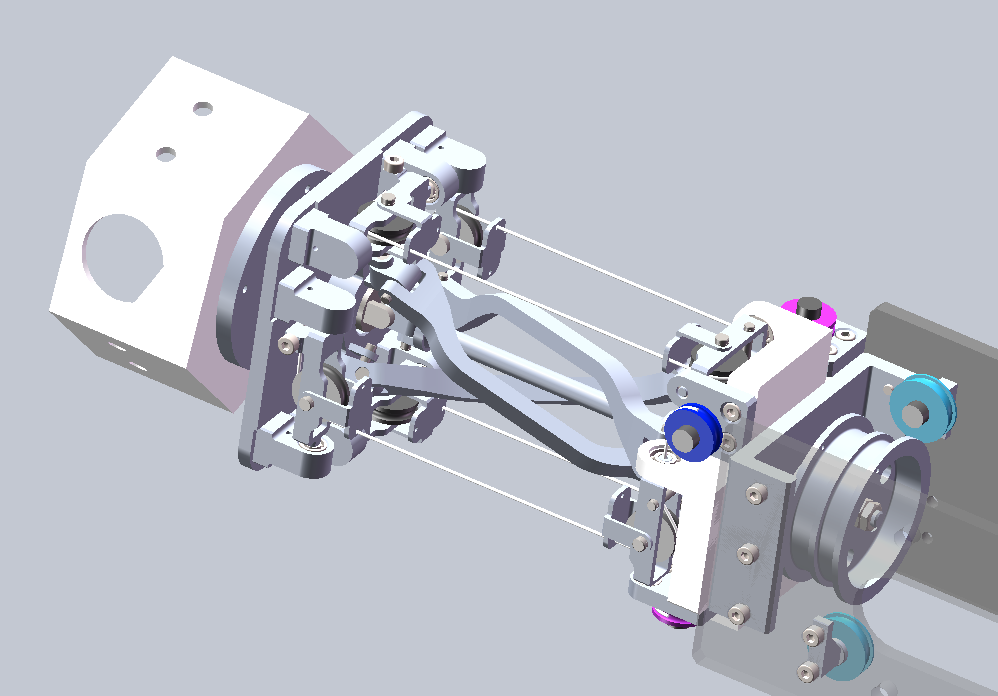
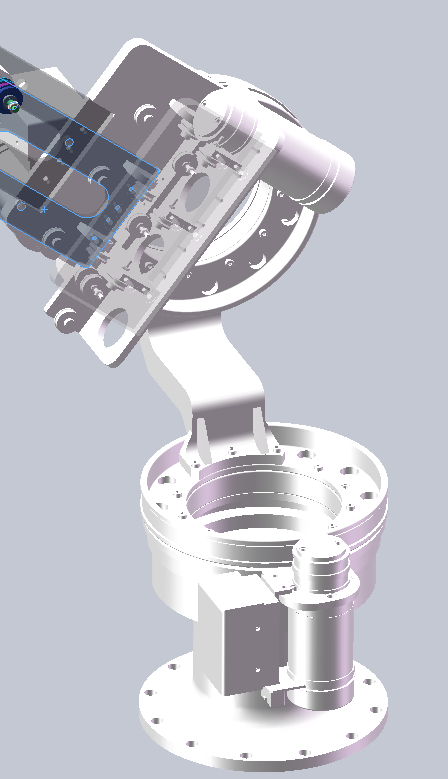
The general manipulator has a large inertia and cannot complete fast operation, but the Cable-driven manipulator can complete fast operation because its weight is concentrated on the shoulder.Such a structure demonstrates its advantages more prominently in space. We are committed to lightweighting and streamlining this robotic arm, enabling agile maintenance work on satellites and spacecraft in space.