map design
https://www.notion.so/1-10f9a83cda19816485eff7a300fe0430
为什么不在ikd tree的基础上进行修改?其实也是试过的。
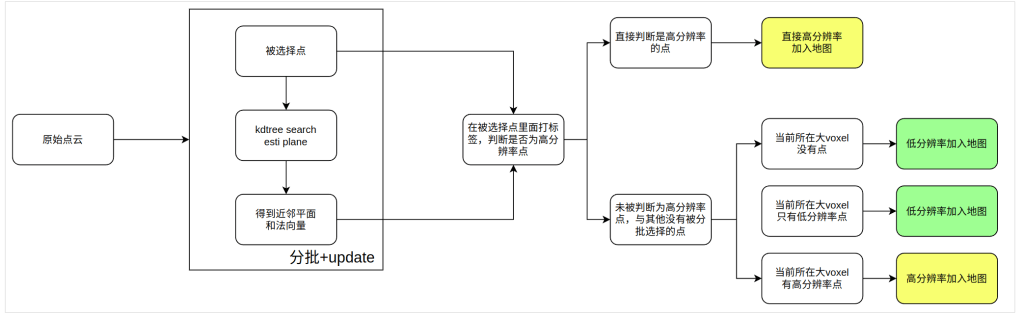
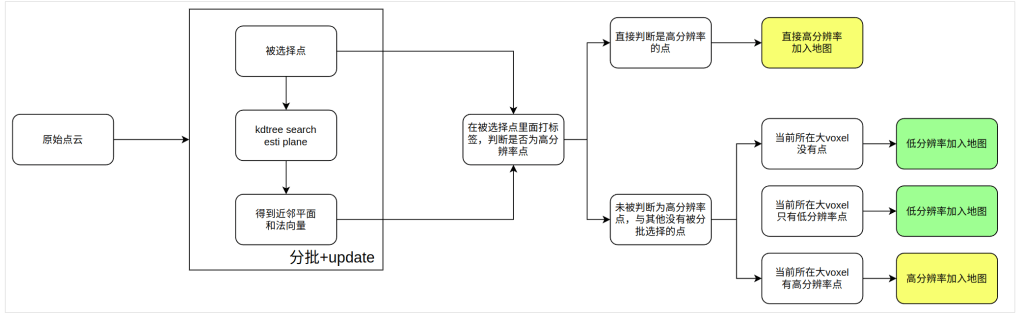
完整的设计
实际上,这个系统一开始有更完整的设计。
- 不退化时,通过点云分批降低耗时,且通过在线外参估计来标定其他传感器
- 退化后,加入其他传感器,松耦合的更新
- 还不行,就进行退化抑制
但是松耦合的方法,尤其是camera,实在是不如livo2这样的sota方法效果好,因为livo2的地图融合了雷达和相机的优势。松耦合的优势在与可以更轻松的添加传感器,不需要提前标定外参,因为可以在lio不退化的时候在线估计。但是有几个核心问题:
- 加相机的效果没法和sota比
- 对于在线外参估计,如果运动者随便走,是不能标定出外参的。比如雷达和车体之间的标定,实际上依赖拟合地面信息来估计。
