多雷达系统,在颠簸环境下,有什么问题:
- dalio method problem:imu不准导致去畸变不准,导致估计不准。
- single lidar method like point lio:too linear,计算量大
- multi lidar:多个雷达之间的外参并不long time consistent,在颠簸环境内尤其严重
所以:
- 我们用adaptive state Augmentation来建模机器的连续运动,这样的话,就是用连续多段的连续运动建模的雷达位姿,同时,状态更新一直都是并行的,所以计算效率很高。
- 我们把这种adaptive state augmentation的方法拓展到多雷达,同时也就解决的多雷达系统中,多个雷达之间的外参围绕固定外参波动的问题。
- 同时,这种方法也可以拓展到纯ml系统上,不通过imu来判断是否做state augmentation,而是通过估计的速度的导数或者角速度的导数。
- 同时,我们引入了一种新的评估方法,来评估局部建图的效果是否稳定,也就是通过局部地面分割来判断。
那这个系统就这样设计:
不需要复杂的建模两个雷达之间外参的扰动,而是把这个扰动放在state augmentation中一起解决。
如果是多imu,我们就用imu融合的方法来claim自己能消除噪声,直接做多imu的融合。(参考mimc)
如果是单imu,也无所谓,甚至在雷达和imu之间存在较大位姿差距的时候,同样可以使用,因为imu只是提供了一个先验。同样,这个也可以解决imu超量程的问题。
如果没有imu,也无所谓。
对于地图,我觉得也可以写进来,就写成voxelmap+这种感觉。我们可以先射箭后画靶,就说一下voxelmap在杂乱崎岖环境可能拟合不出平面,所以要保留一些点来做拟合。这部分不需要花太多的精力来写。
我觉得我们还是要在最sota的方法上来开发我们的方法,所以,对于voxelmap里,关于点的噪声建模,我在考虑要不要加回来。对于voxelmap的持续拟合的功能,我觉得一定要加回来。这个如果到时候发现耗时不合适,就把持续拟合的次数搞少一些就行了。
实验
数据集:
对比方法:m-loam(jianhao jiao,https://github.com/gogojjh/M-LOAM),d loam(https://arxiv.org/pdf/2007.01483,本实验室,https://github.com/hku-mars/decentralized_loam),但是这些都是没有imu的。https://github.com/shenhm516/CTE-MLO
有imu的:https://github.com/minwoo0611/MA-LIO,https://github.com/engcang/FAST_LIO_MULTI这个不是文章,是网上的实现。
可以看一下ma lio里面是怎么进行对比评估的,因为他里面也比较了m loam,可以学习学习他是怎么讲故事的。
cte lio里面比较的方法不多,可以看看方法和消融实验怎么做的,评估一下基于连续时间的方法和我们的方法之间的差异。
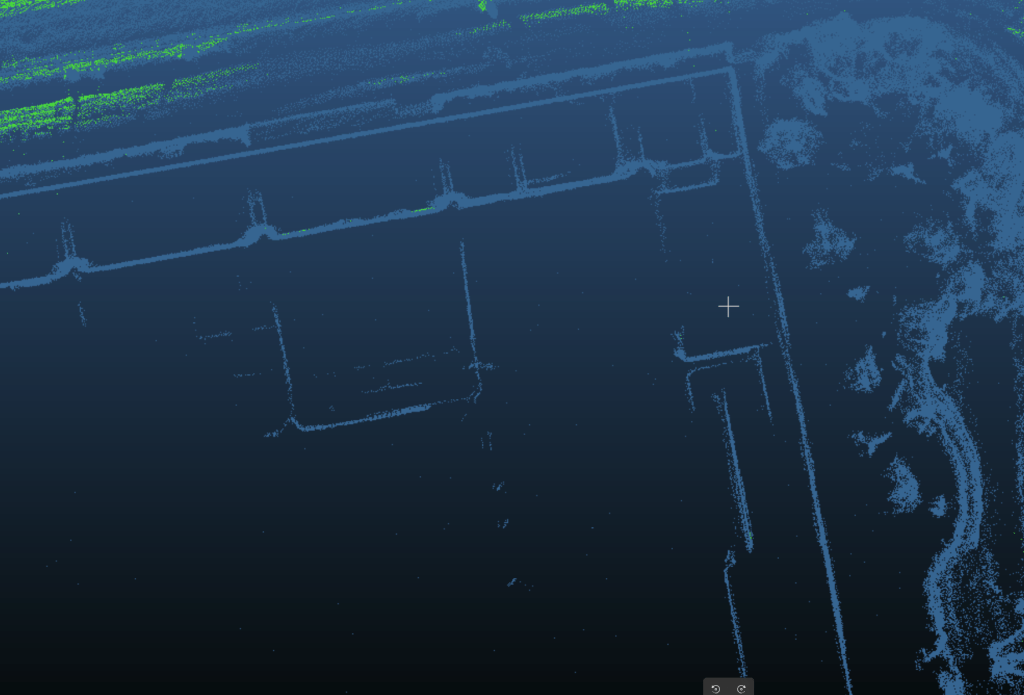
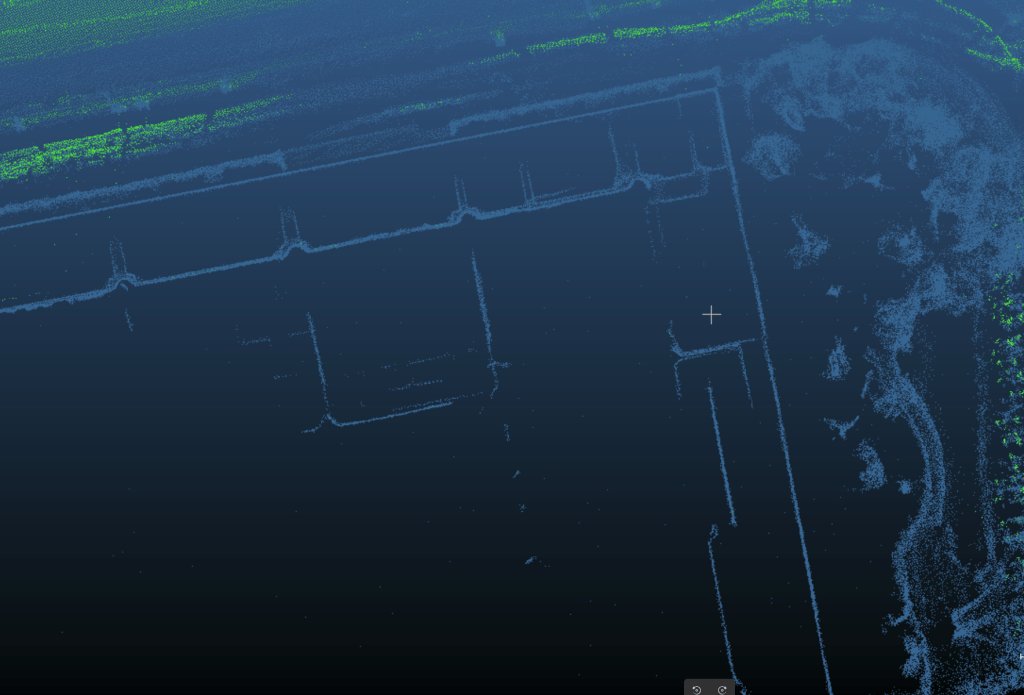
自己采集的数据集:我反而觉得这一部分应该占大头,因为我们的靶子就是多雷达系统+很颠簸的环境,所以自己采集的数据集很重要。然后,要说我们在运行的时候,发现对于评估地面机器人的可通过性,比看回环指标更加的重要,因为回环指标可能受地图影响较大,但是真正用来评估地面是不是可通行的,还是要看局部的点云。所以我们就引入了一种新的评估方法来评估我们的效果。也就是用地面分割的算法来评估我的方法。这部分可以让qingbo提供个评分接口,或者我们再讨论一下。
这里的写法,应该是数据集作为一部分,然后定性分析我们的数据以及评估方法是另一个部分。数据集部分就用传统的里程计对比方法,耗时,rmse,e2e等。