-

Cable-driven 7-DOF humanoid manipulator
At Tsinghua AI & Robot Lab, I, along with Xiankun Zhu, Hong Luo, and others, collaborated under the guidance of Dr. Chongkun Xia to accomplish the inaugural design and control of the Cable-driven 7-DOF humanoid… Read more
-

Robocon2022
In the 2021-2022 season, under the leadership of Siqi Liang, the robot combat team of Harbin Institute of Technology (Shenzhen) – WTR, participated in the Robocon 2022 competition. I am also fortunate to have become… Read more
-
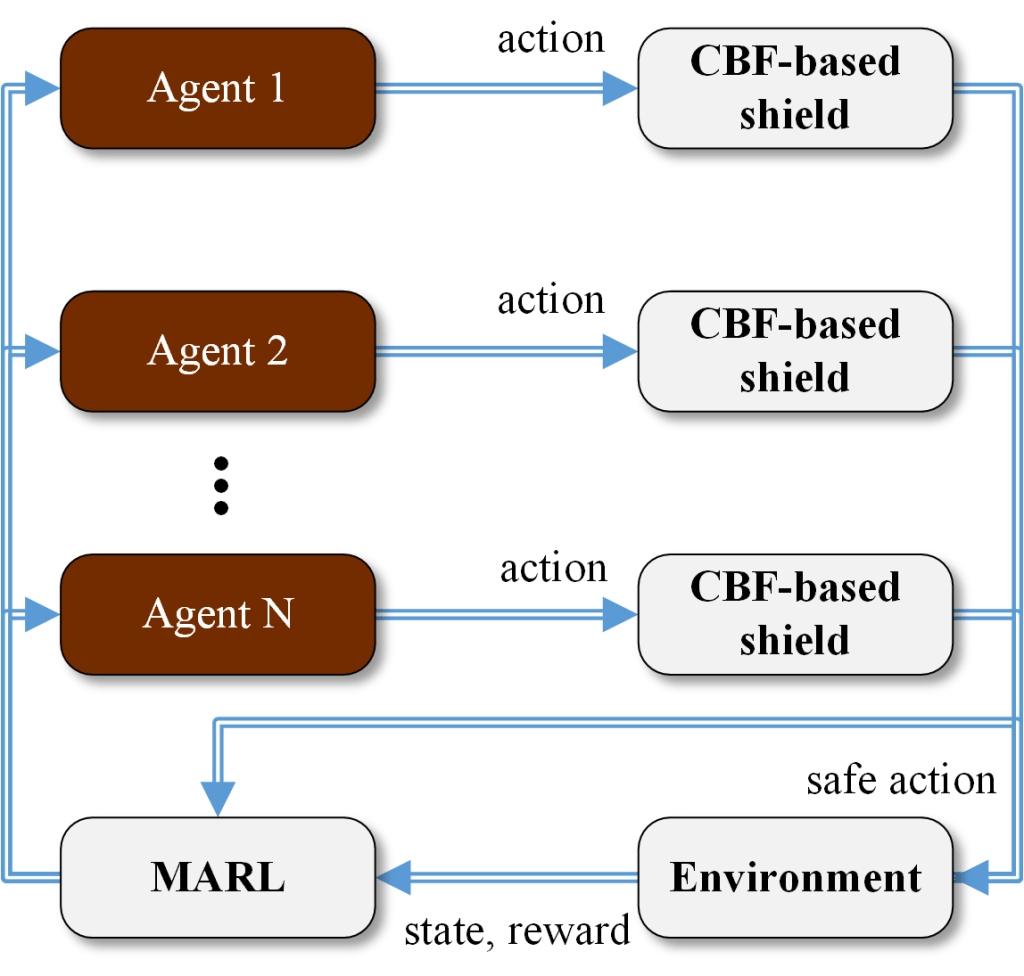
Safe Reinforcement Learning-based Motion Planning for Functional Mobile Robots Suffering an Uncontrollable Mobile Robot
An increasing number of Autonomous Mobile Robots(AMRs)have been used in warehouses and factories in recent years.With the number of AMRs in a warehouse or factory increased,the risk of one of the AMRs being out of control… Read more
-
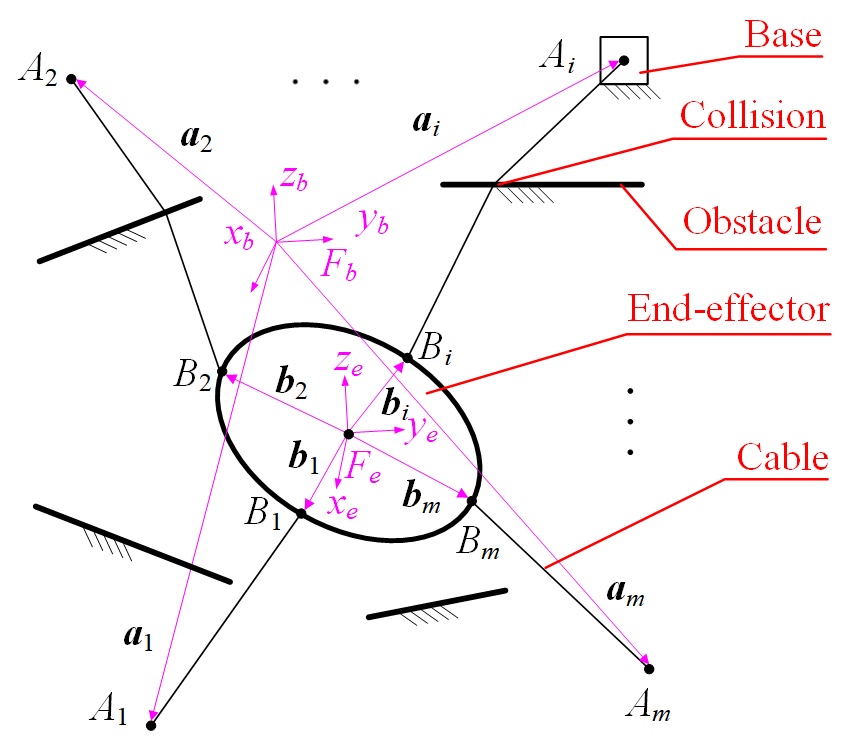
Data-Driven Dynamics Modeling and Control Strategy for a Planar n-DOF Cable-Driven Parallel Driven by n+1 Cables Allowing Collisions
Scholars have proposed to allow collisions of cables with the base, the end-effector, or obstacles to expand the workspace of Cable-Driven Parallel Robots (CDPRs) in recent years.However, allowing collisions also leads to new challenges in… Read more
-
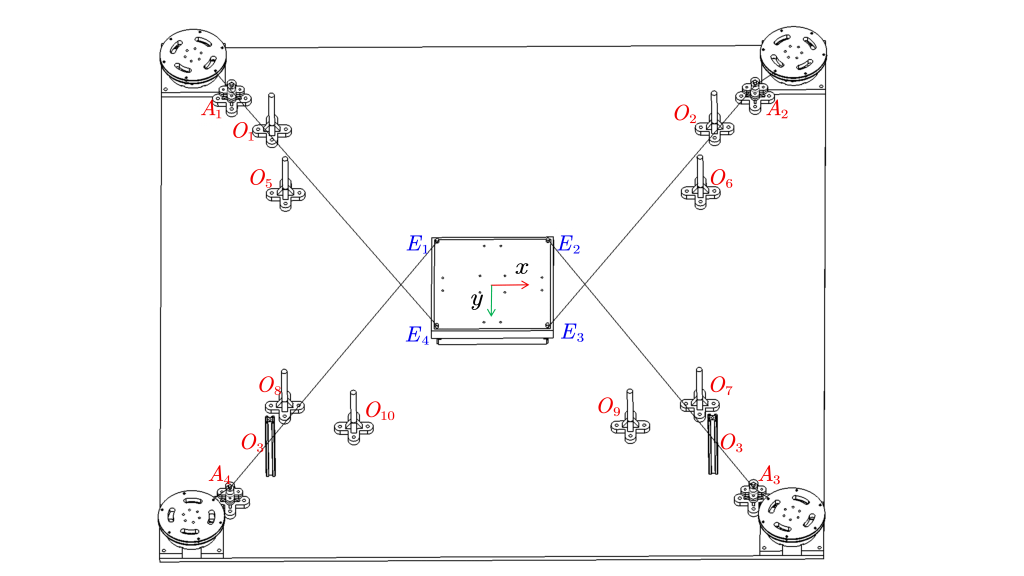
Dynamic Control of a Cable-Driven Parallel Robot Allowing Collisions via Sim-to-Real Reinforcement Learning
Cable-Driven Parallel Robots (CDPRs) have attracted the attention of a large number of researchers in recent years.Researchers proposed to allow wrapping phenomenon to expand the workspace of CDPRs, leading to challenges in the dynamic control… Read more
Welcome to my research web!
I am Haoda Zhu, a researcher in the field of robotics. On this academic homepage, I will be sharing my research findings and contributions in the realm of robotics.
Key words
robotics; SLAM; reinforcement learning.
