-
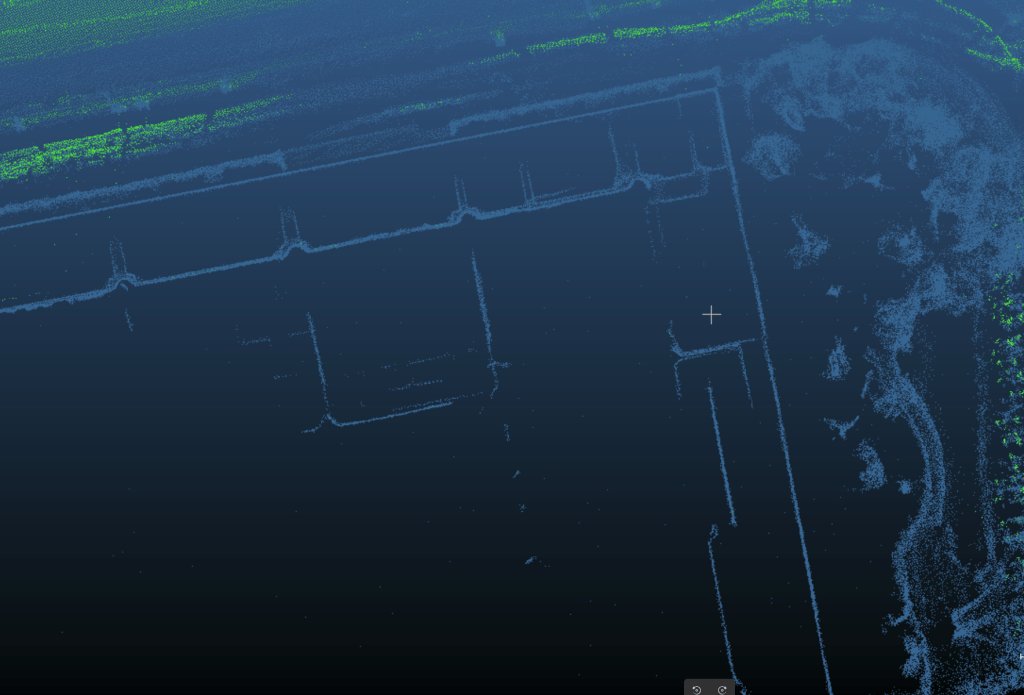
Multi-LiDAR Odometry for Bumpy Environments
多雷达系统,在颠簸环境下,有什么问题: 所以: 那这个系统就这样设计: 不需要复杂的建模两个雷达之间外参的扰动,而是把这个扰动放在state augmentation中一起解决。 如果是多imu,我们就用imu融合的方法来claim自己能消除噪声,直接做多imu的融合。(参考mimc) 如果是单imu,也无所谓,甚至在雷达和imu之间存在较大位姿差距的时候,同样可以使用,因为imu只是提供了一个先验。同样,这个也可以解决imu超量程的问题。 如果没有imu,也无所谓。 对于地图,我觉得也可以写进来,就写成voxelmap+这种感觉。我们可以先射箭后画靶,就说一下voxelmap在杂乱崎岖环境可能拟合不出平面,所以要保留一些点来做拟合。这部分不需要花太多的精力来写。 我觉得我们还是要在最sota的方法上来开发我们的方法,所以,对于voxelmap里,关于点的噪声建模,我在考虑要不要加回来。对于voxelmap的持续拟合的功能,我觉得一定要加回来。这个如果到时候发现耗时不合适,就把持续拟合的次数搞少一些就行了。 实验 数据集: 对比方法:m-loam(jianhao jiao,https://github.com/gogojjh/M-LOAM),d loam(https://arxiv.org/pdf/2007.01483,本实验室,https://github.com/hku-mars/decentralized_loam),但是这些都是没有imu的。https://github.com/shenhm516/CTE-MLO 有imu的:https://github.com/minwoo0611/MA-LIO,https://github.com/engcang/FAST_LIO_MULTI这个不是文章,是网上的实现。 可以看一下ma lio里面是怎么进行对比评估的,因为他里面也比较了m loam,可以学习学习他是怎么讲故事的。 cte lio里面比较的方法不多,可以看看方法和消融实验怎么做的,评估一下基于连续时间的方法和我们的方法之间的差异。 自己采集的数据集:我反而觉得这一部分应该占大头,因为我们的靶子就是多雷达系统+很颠簸的环境,所以自己采集的数据集很重要。然后,要说我们在运行的时候,发现对于评估地面机器人的可通过性,比看回环指标更加的重要,因为回环指标可能受地图影响较大,但是真正用来评估地面是不是可通行的,还是要看局部的点云。所以我们就引入了一种新的评估方法来评估我们的效果。也就是用地面分割的算法来评估我的方法。这部分可以让qingbo提供个评分接口,或者我们再讨论一下。 这里的写法,应该是数据集作为一部分,然后定性分析我们的数据以及评估方法是另一个部分。数据集部分就用传统的里程计对比方法,耗时,rmse,e2e等。 Read more
-
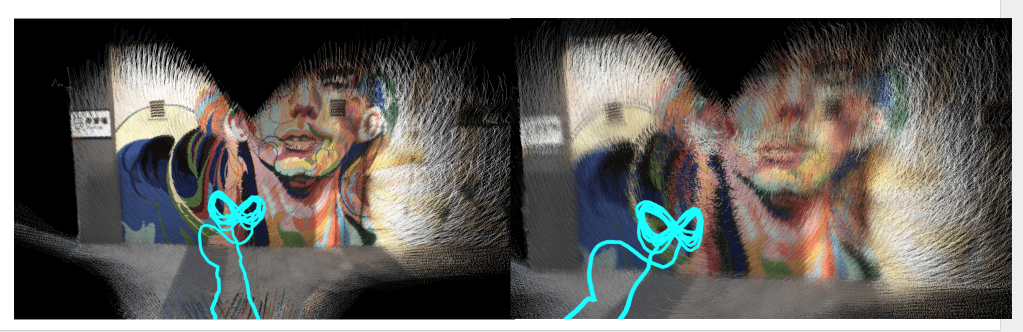
rs livo
什么是rolling shutter? https://blog.csdn.net/lz0499/article/details/102616773 一开始,总想着把位姿更新里加入角速度和加速度之类的,还是更新一个位姿,但是怎么也做不出媲美livo2在golbal shutter模式下的效果。 想法:elastic slam,and msckf elastic slam such as ct-icp,基于优化的,同时优化雷达帧的开始和结束位姿。 msckf:通过在滤波状态中维护多个时间的位姿克隆,使一个视觉测量同时约束多个状态,并通过消元把“非状态变量(特征)”的影响折叠进状态更新。 对于rolling shutter,其实一个视觉测量就是可以约束多个姿态,也就是可以简单的把rs的姿态设定为两个,开始姿态和结束姿态。 最终方案的核心: 对于自适应位姿clone,主要的问题是如何判断要插入一个clone位姿。对于rs来说,旋转的影响更大,而我们的模型里,两个clone位姿之间是slerp插值,所以当角加速度过大的时候,位姿插值就会不准确。 通过设定最大角度误差的值,推算最大可接受的角加速度,通过这个来确定要不要加入位姿。 后续也可以加入平移上界,不过目前看来够用了。 对于图像去畸变: rolling shutter aware neuvox 方法: 原始方案中,体渲染沿射线采样空间点,查询体素网格得到颜色与密度,经体渲染方程积分为像素颜色。核心假设是一张图所有像素共享同一相机位姿,所有射线从同一原点、按固定朝向发出。 但卷帘快门相机逐行曝光,曝光期间相机持续运动,不同行实际对应不同位姿。若仍用单一位姿生成射线,会引入系统性几何误差,产生条纹伪影和几何失真。 本次改造为每张图像引入多个行级锚点位姿,训练时根据像素行号在相邻锚点间做插值,得到逐行专属位姿并据此生成射线。体渲染流程本身不变,仅射线的起点与方向更贴合真实成像过程。 Read more
-

Cable-driven 7-DOF humanoid manipulator
At Tsinghua AI & Robot Lab, I, along with Xiankun Zhu, Hong Luo, and others, collaborated under the guidance of Dr. Chongkun Xia to accomplish the inaugural design and control of the Cable-driven 7-DOF humanoid… Read more
-

Robocon2022
In the 2021-2022 season, under the leadership of Siqi Liang, the robot combat team of Harbin Institute of Technology (Shenzhen) – WTR, participated in the Robocon 2022 competition. I am also fortunate to have become… Read more
-
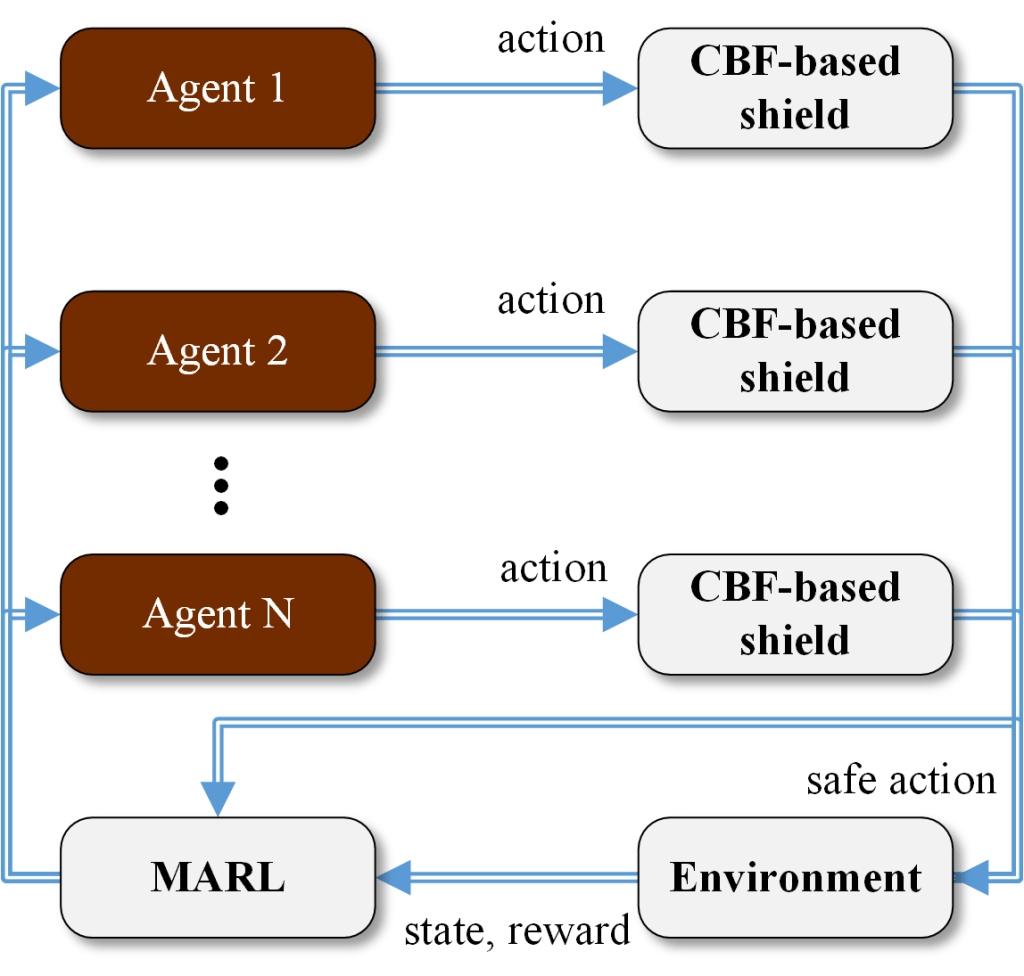
Safe Reinforcement Learning-based Motion Planning for Functional Mobile Robots Suffering an Uncontrollable Mobile Robot
An increasing number of Autonomous Mobile Robots(AMRs)have been used in warehouses and factories in recent years.With the number of AMRs in a warehouse or factory increased,the risk of one of the AMRs being out of control… Read more
-
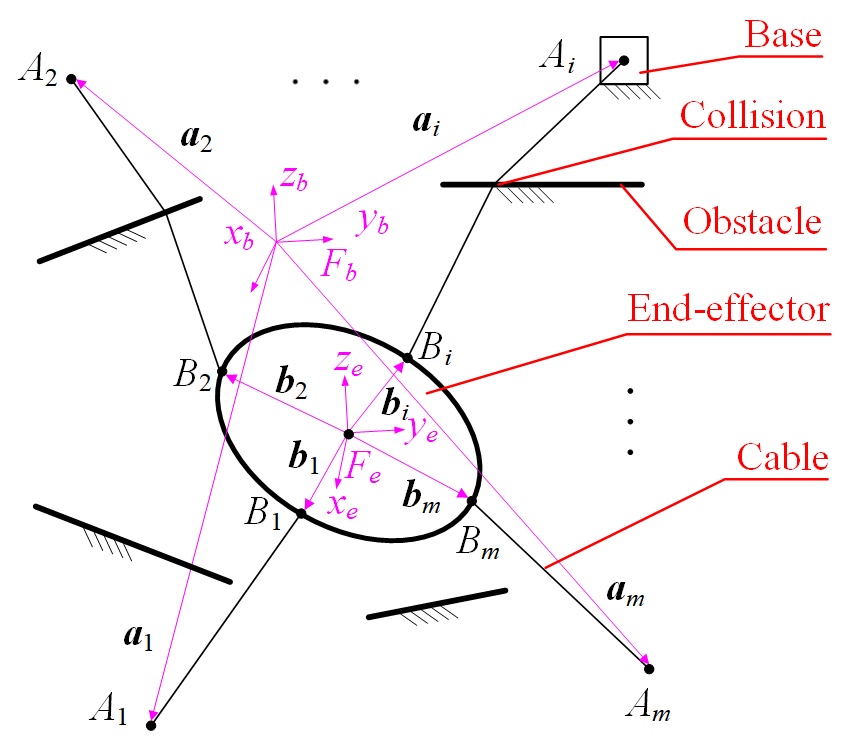
Data-Driven Dynamics Modeling and Control Strategy for a Planar n-DOF Cable-Driven Parallel Driven by n+1 Cables Allowing Collisions
Scholars have proposed to allow collisions of cables with the base, the end-effector, or obstacles to expand the workspace of Cable-Driven Parallel Robots (CDPRs) in recent years.However, allowing collisions also leads to new challenges in… Read more
-
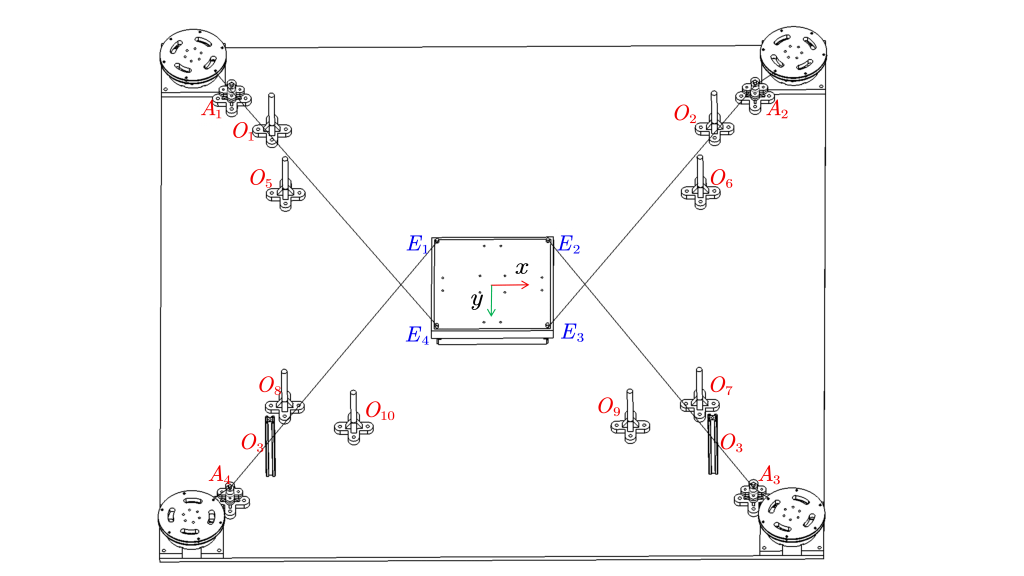
Dynamic Control of a Cable-Driven Parallel Robot Allowing Collisions via Sim-to-Real Reinforcement Learning
Cable-Driven Parallel Robots (CDPRs) have attracted the attention of a large number of researchers in recent years.Researchers proposed to allow wrapping phenomenon to expand the workspace of CDPRs, leading to challenges in the dynamic control… Read more
Welcome to my research web!
I am Haoda Zhu, a researcher in the field of robotics. On this academic homepage, I will be sharing my research findings and contributions in the realm of robotics.
Key words
robotics; SLAM; reinforcement learning.
